有关光电编码器的工作原理,光电编码器是一种常用的角位移传感器,编码器一般分为增量型和绝对型两种,详细介绍了增量式编码器、绝对式编码器与混合式绝对值编码器的工作原理。
光电编码器的工作原理
1、工作原理
光电编码器是一种常用的角位移传感器,其结构通常是在一个圆盘上开有若干条狭缝,然后在它的一边放上发光器件,另一边放上光敏器件,当光电盘旋转时,就可以在光敏器件上得到与旋转角度相对应的脉冲信号。
编码器一般分为增量型和绝对型两种。增量型编码器的光电盘周围开有两排电信号相位差90度的狭缝,当圆盘转动时,就可以得到A、B两相脉冲,A、B两相脉冲的数量只反映码盘转动的位移而不能反映其绝对位置(如图1)。
绝对性编码器是在码盘周围的每一位置上刻有表示该位置的唯一代码,其结构和增量编码器相似。
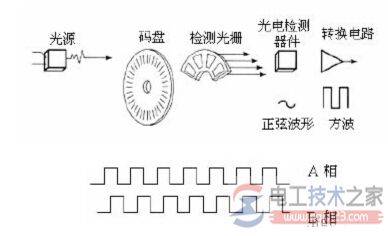
图1 光电编码器工作原理示意图
2、光电编码器原理图解
一、光电编码器工作原理-简介
光电编码器,又称为手轮脉冲发生器,简称手轮,是一种通过光电转换将输出轴的机械几何位移量转换为脉冲或数字量的传感器,主要应用于各种数控设备,是目前应用最多的一种传感器。
光电编码器有国标和非国标两种分类标准。按原料的不同可分为天然橡胶型、塑料型、胶木型和铸铁卸,按样式的不同可分为圆轮缘型、内波纹型、平面面、表盘型等等,按工作原理的不同可分为光学型、磁型、感应型和电容型,按刻度方法和信号输出形式的不同可分为增量型、绝对型和混合型。
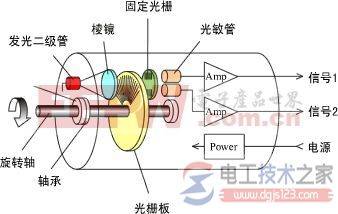
光电编码器主要由光栅盘和光电检测装置构成,在伺服系统中,光栅盘与电动机同轴致使电动机的旋转带动光栅盘的旋转,再经光电检测装置输出若干个脉冲信号,根据该信号的每秒脉冲数便可计算当前电动机的转速。
光电编码器的码盘输出两个相位差相差90度的光码,根据双通道输出光码的状态的改变便可判断出电动机的旋转方向。
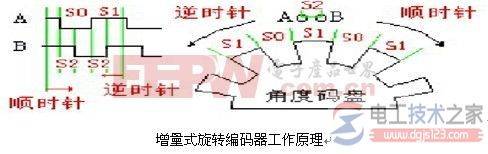
3、增量式编码器
增量式编码器是光电编码器的一种,其主要工作原理也是光电转换,但其输出的是A、B、Z三组方波脉冲,其中A、B两脉冲相位差相差90度以判断电动机的旋转方向,Z脉冲为每转一个脉冲以便于基准点的定位。
4、绝对式编码器
绝对式编码器的主要工作原理为光电转换,但其输出的是数字量,在绝对式编码器的码盘上存在有若干同心码道,每条码道由透光和不透光的扇形区间交叉构成,码道数就是其所在码盘的二进制数码位数,码盘的两侧分别是光源和光敏元件,码盘位置的不同会导致光敏元件受光情况不同进而输出二进制数不同,因此可通过输出二进制数来判断码盘位置。

5、混合式绝对值编码器
混合式绝对值编码器的主要工作原理同样为光电转换,其与增量型、绝对型编码器的不同在于输出量不同。
混合式绝对值编码器输出的信息有两组,一组输出信息为A、B、Z三组方波脉冲,与增量式编码器的输出完全不同,另一组输出信息具有绝对信息功能,主要用于磁极位置的检测。